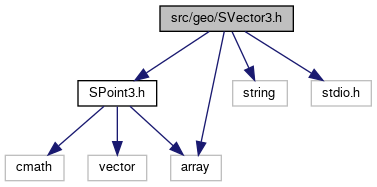

Go to the source code of this file.
Classes | |
| class | SVector3 |
Functions | |
| double | dot (const SVector3 &a, const SVector3 &b) |
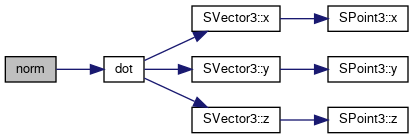
| double | norm (const SVector3 &v) |
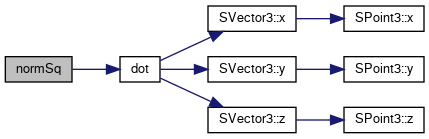
| double | normSq (const SVector3 &v) |
| SVector3 | crossprod (const SVector3 &a, const SVector3 &b) |
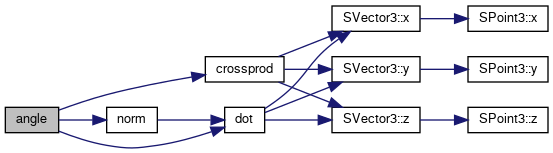
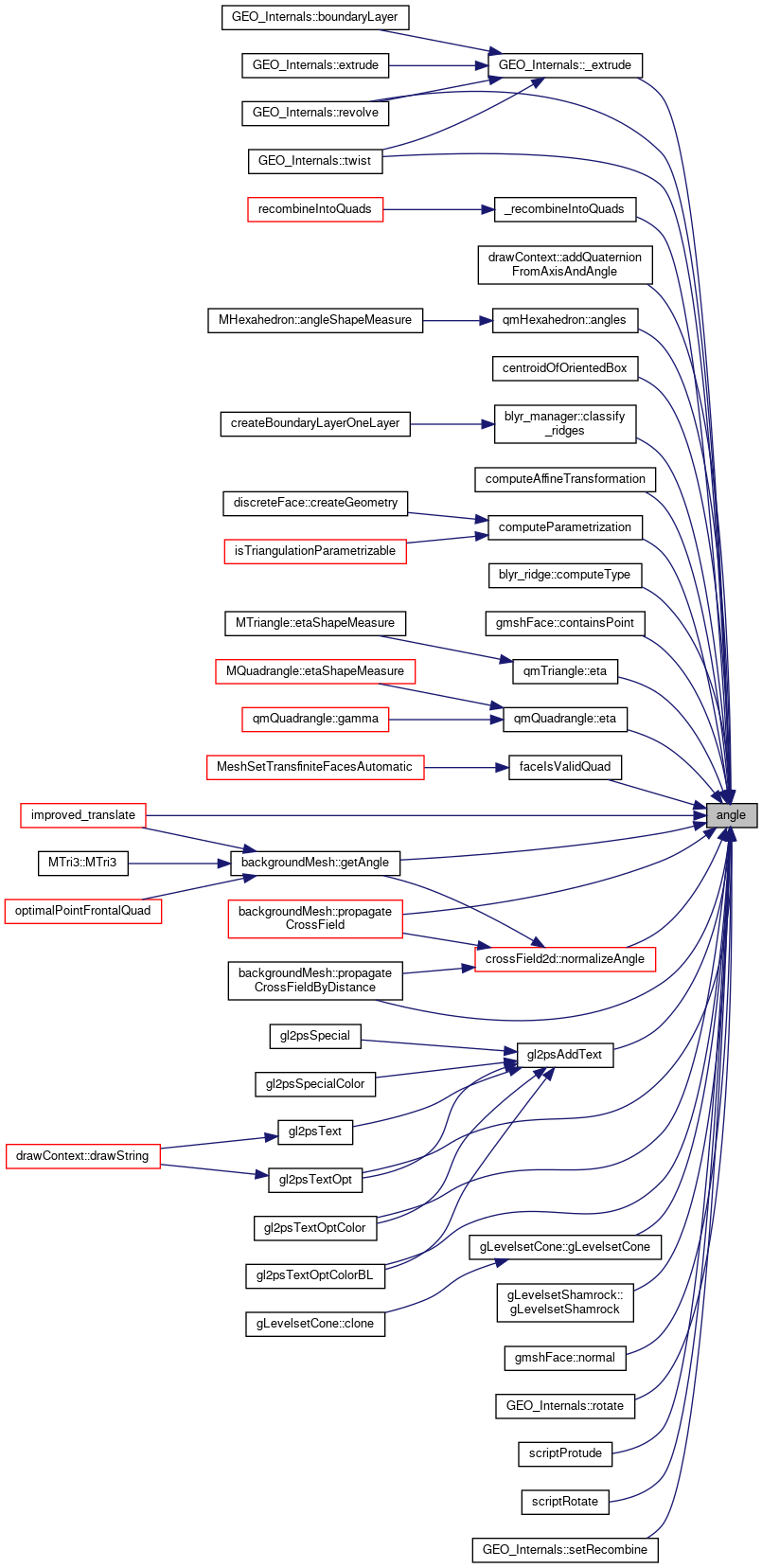
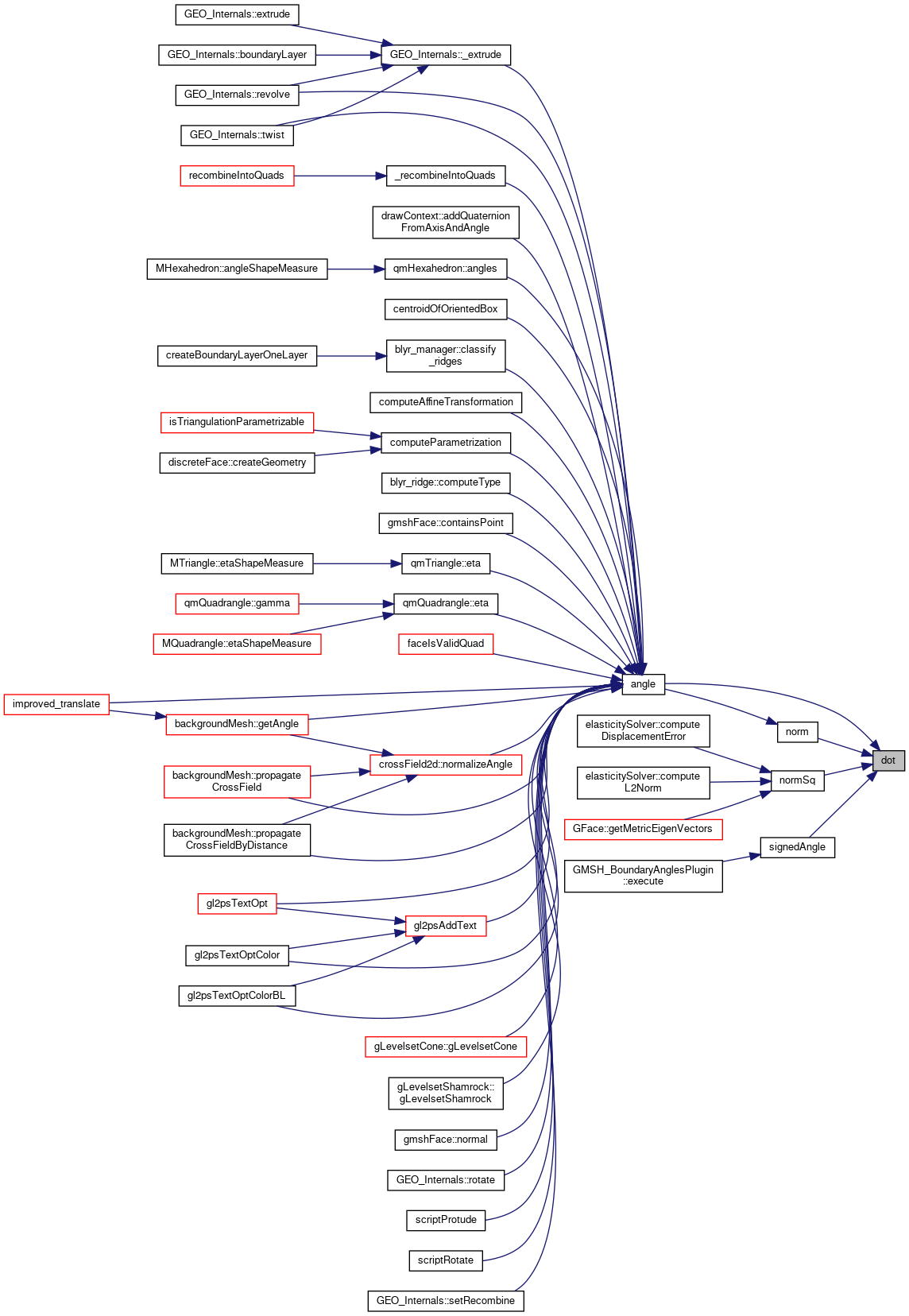
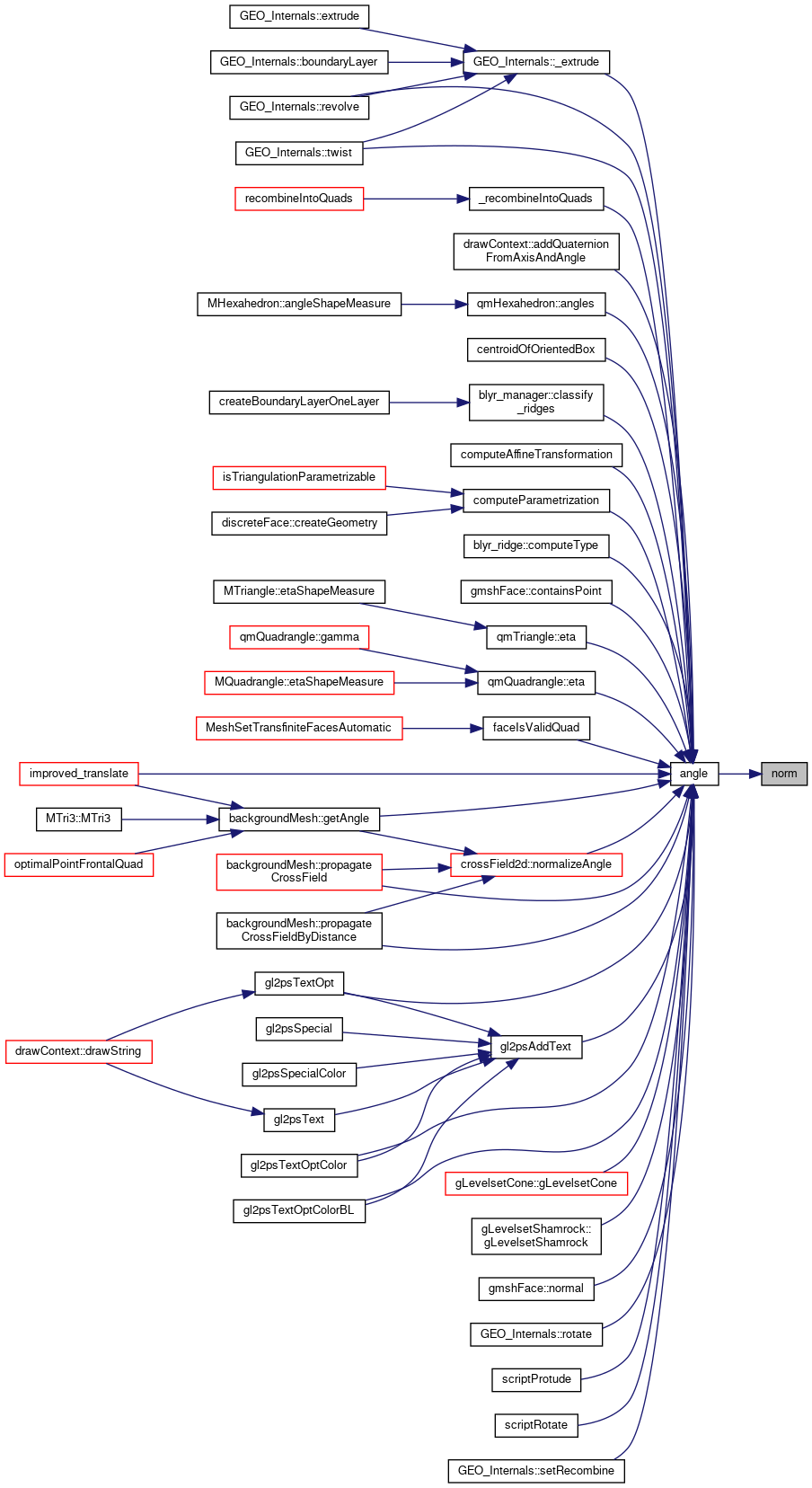
| double | angle (const SVector3 &a, const SVector3 &b) |
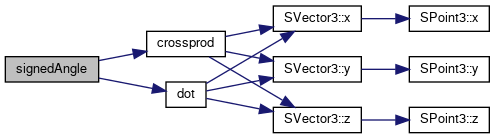
| double | signedAngle (const SVector3 &a, const SVector3 &b, const SVector3 &n) |
| SVector3 | operator* (double m, const SVector3 &v) |
| SVector3 | operator* (const SVector3 &v, double m) |
| SVector3 | operator* (const SVector3 &v1, const SVector3 &v2) |
| SVector3 | operator+ (const SVector3 &a, const SVector3 &b) |
| SPoint3 | operator+ (const SPoint3 &a, const SVector3 &b) |
| SVector3 | operator- (const SVector3 &a, const SVector3 &b) |
| SPoint3 | operator- (const SPoint3 &a, const SVector3 &b) |
| SVector3 | operator- (const SVector3 &a) |
| void | buildOrthoBasis_naive (SVector3 &dir, SVector3 &dir1, SVector3 &dir2) |
| void | buildOrthoBasis (SVector3 &normal, SVector3 &tangent, SVector3 &binormal) |
| void | buildOrthoBasis2 (SVector3 &normal, SVector3 &tangent, SVector3 &binormal) |
Function Documentation
◆ angle()
Definition at line 157 of file SVector3.h.
Referenced by GEO_Internals::_extrude(), _recombineIntoQuads(), drawContext::addQuaternionFromAxisAndAngle(), qmHexahedron::angles(), centroidOfOrientedBox(), blyr_manager::classify_ridges(), computeAffineTransformation(), computeParametrization(), blyr_ridge::computeType(), gmshFace::containsPoint(), qmTriangle::eta(), qmQuadrangle::eta(), faceIsValidQuad(), backgroundMesh::getAngle(), gl2psAddText(), gl2psTextOpt(), gl2psTextOptColor(), gl2psTextOptColorBL(), gLevelsetCone::gLevelsetCone(), gLevelsetShamrock::gLevelsetShamrock(), improved_translate(), gmshFace::normal(), crossField2d::normalizeAngle(), backgroundMesh::propagateCrossField(), backgroundMesh::propagateCrossFieldByDistance(), GEO_Internals::revolve(), GEO_Internals::rotate(), scriptProtude(), scriptRotate(), GEO_Internals::setRecombine(), and GEO_Internals::twist().
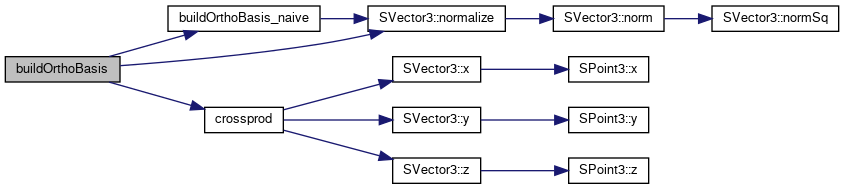
◆ buildOrthoBasis()
Definition at line 257 of file SVector3.h.
Referenced by transformPointsIntoOrthoBasis().

◆ buildOrthoBasis2()
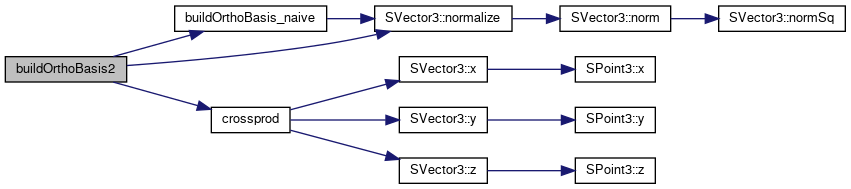
◆ buildOrthoBasis_naive()
Definition at line 212 of file SVector3.h.
Referenced by buildOrthoBasis(), and buildOrthoBasis2().


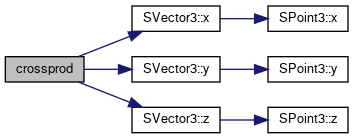
◆ crossprod()
Definition at line 150 of file SVector3.h.
Referenced by discreteFace::_computeSTLNormals(), MElement::_getFaceRep(), _myGetFaceRep(), addExtrudeNormals(), addTriangle(), angle(), angle3Vertices(), buildMetricTangentToCurve(), buildMetricTangentToSurface(), buildOrthoBasis(), buildOrthoBasis2(), changeCoordinates(), discreteFace::closestPoint(), GFace::computeMeanPlane(), GEdge::curvature(), GFace::curvatureDiv(), decasteljau(), drawNormalVectorGlyphs(), qmQuadrangle::eta(), GMSH_CrackPlugin::execute(), MFaceN::frame(), MTetrahedron::getEdgeRep(), MQuadrangle::getEdgeRep(), MTriangle::getEdgeRep(), MHexahedron::getEdgeRep(), MSubTriangle::getGradShapeFunctions(), getLineNormal(), GFace::getMetricEigenVectors(), MTriangle::getVolume(), improved_translate(), insertVertexB(), discreteFace::intersectionWithCircle(), SOrientedBoundingBox::intersects(), metric_based_on_surface_curvature(), minimizeTutteEnergyProj(), myAngle(), myLine::myLine(), qmTriangle::NCJ(), qmQuadrangle::NCJ(), discreteFace::normal(), MEdge::normal(), PolyMesh::normal(), MFaceN::normal(), GFace::normal(), normal3(), oneSidedHausdorffDistance(), optimalPointFrontalB(), prismNCJ(), backgroundMesh::propagateCrossField(), RecombineTriangle::RecombineTriangle(), signedAngle(), signedDistancePointTriangle(), signedDistancesPointsTriangle(), sqDistPointSegment(), MFace::tangent(), and TRIANGLE_VALIDITY().
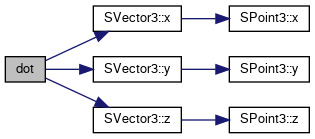
◆ dot()
Definition at line 141 of file SVector3.h.
Referenced by angle(), norm(), normSq(), and signedAngle().
◆ norm()
|
inline |
Definition at line 146 of file SVector3.h.
Referenced by angle().
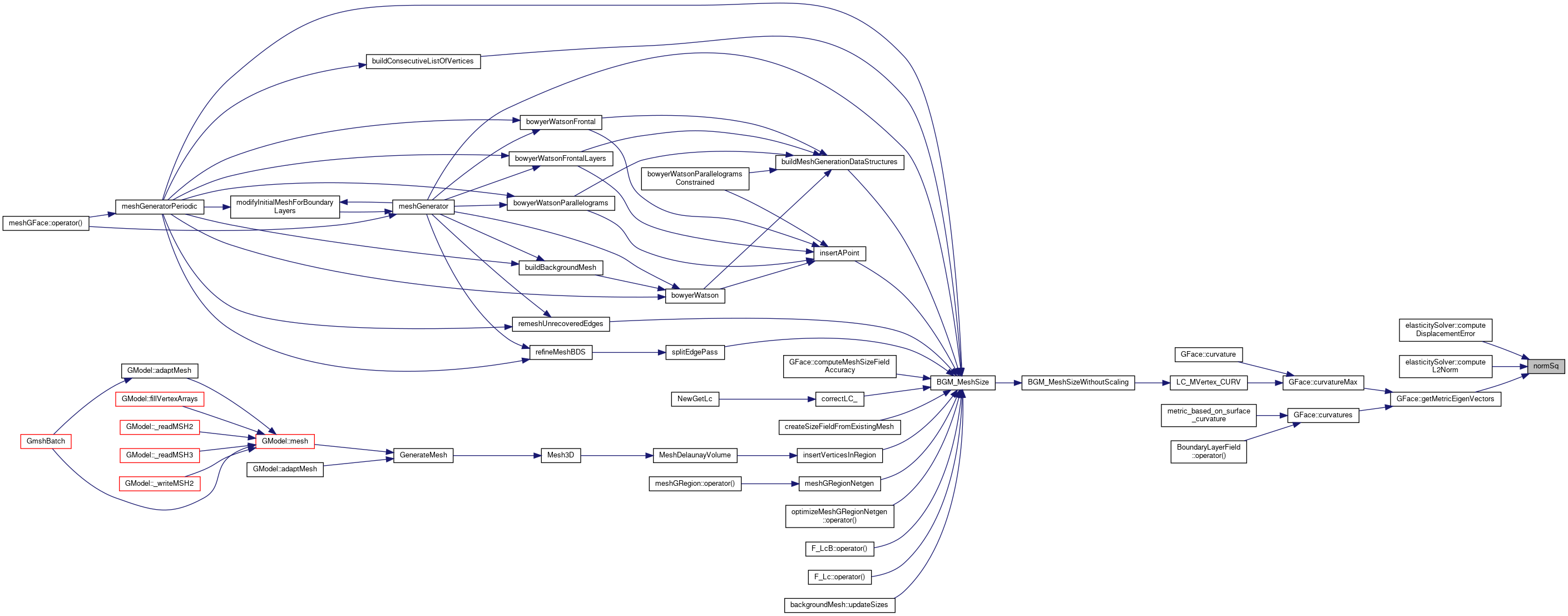
◆ normSq()
|
inline |
Definition at line 148 of file SVector3.h.
Referenced by elasticitySolver::computeDisplacementError(), elasticitySolver::computeL2Norm(), and GFace::getMetricEigenVectors().
◆ operator*() [1/3]
Definition at line 177 of file SVector3.h.
◆ operator*() [2/3]
Definition at line 182 of file SVector3.h.
◆ operator*() [3/3]
Definition at line 172 of file SVector3.h.
◆ operator+() [1/2]
Definition at line 192 of file SVector3.h.
◆ operator+() [2/2]
Definition at line 187 of file SVector3.h.
◆ operator-() [1/3]
Definition at line 202 of file SVector3.h.
◆ operator-() [2/3]
Definition at line 207 of file SVector3.h.
◆ operator-() [3/3]
Definition at line 197 of file SVector3.h.
◆ signedAngle()
Definition at line 164 of file SVector3.h.
Referenced by GMSH_BoundaryAnglesPlugin::execute().